10余架手掌大小、单机重量小于一听可乐的微型空中机器人,在浙江安吉的一片竹林中腾空而起,在没有GPS、动作捕捉系统、远程通信运算或是预先建立环境地图的情况下,各自独立又协作地穿过低矮的灌木、倾斜的竹竿、起伏的地面、稠密的树枝,如同一支协同却又自主的鸟群。
这是浙江大学控制科学与工程学院高飞、许超团队对全自主微型空中机器人的最新研究成果之一。团队研发的微型且完全自主的空中机器人,能够在高度混乱的野外环境中,根据机载传感器提供的有限信息实现集群飞行。机器人上的轨迹规划算法能够自主规划飞行路线,同时满足飞行效率、避障、机器人间相互避碰、动力学可行性、集群协调等多种要求。
当地时间5月4日,以上成果以《野外微型飞行机器人集群》(Swarm of micro flying robots in the wild)为题,并作为封面文章发表在机器人领域的国际顶刊《科学·机器人》(SCIENCE ROBOTICS)上。论文第一作者为浙大控制学院在读博士生周鑫,通讯作者为高飞博士和许超教授。
在接受澎湃新闻(www.thepaper.cn)记者采访时,浙大控制学院博导高飞表示,这一成果将为未来微型空中机器人集群以及相关算法应用在户外救灾、野外生物研究、协作运输等领域奠定基础。
作为未来技术的象征,空中多机器人系统的灵活性已经在诸多科幻电影中有所呈现。在《普罗米修斯》中,宇航员在决定走哪条路之前,释放了几个微型飞行装置来探索一艘未知的外星飞船。在《安德的游戏》中,空中机器人集群系统包围了宇宙飞船,形成了一个抵御外星人攻击的盾牌,为人类扫清了一条赢得战斗的道路。在《星球大战前传3》和《银翼杀手2049》中,摩天大楼之间的空中交通在高科技星球上繁忙而有序的运行。
随着处理器计算能力、感知和通信方面的发展,诸如四旋翼飞行器之类的空中机器人已经进入大众生活,这些飞行器不但具有高机动性,而且价格低廉。据《日本经济新闻》报道,DJI的Mavic Air 2是目前最畅销的空中机器人之一,它拥有避障、跟踪等功能,并且具有10公里的通信距离,其硬件成本仅约135美元。此外,空中机器人市场仍有大量的可能性,到2028年,空中机器人整体市场价值预计将达到5000亿美元。
不过,尽管空中机器人自主导航在工业和学术实践中都得到了快速的发展,但高度混乱的环境,如茂密的森林,仍然是空中机器人难以进入且自由穿梭的,更不用说成群的空中机器人。在这些场景中,未知的复杂环境和狭窄的可行空间会对空中机器人集群协调带来极大的挑战。
“在空中机器人的研究中,从单一机器人转向协同的集群系统,也是机器人智能发展的必然趋势。”高飞向澎湃新闻记者介绍说。空中机器人是高飞在香港科技大学攻读博士学位时的主要研究领域,当时其研究方向主要为空中机器人单机导航。2019年底,高飞到浙江大学任职并开始带领团队开展空中机器人自主导航及集群技术研究,团队为此次野外空中机器人集群论文准备了约两年时间。
据了解,在混乱的野外环境下空中机器人集群导航之所以困难,是因为野外环境对空中机器人集群提出了四方面的要求,简称TEEM——轨迹最优性(trajectory optimality), 可扩展性(extensibility,)、低成本计算需求(economical computing)和小型化(miniature size)。
轨迹最优性反映了任务质量和飞行时间,这种效率在紧急的救援情况下至关重要。轨迹最优性要求面对各种复杂环境,都能够允许空中机器人快速、安全、稳定的飞行和穿越,这种性能在紧急救援情况和混乱狭窄环境中至关重要。
可扩展性指的是空中机器人对不同任务的需求在软件硬件上的拓展能力,如针对多机协同目标跟踪任务,既需要在软件上增加识别功能又需要在硬件上拓展多方位镜头。
低计算成本需求非常重要,这允许了空中机器人携带更小的机载处理器,并且减少对变化环境和突发情况的反应时间,从而为其他用户定义的任务(如目标检测和决策)预留尽可能多的可用计算资源。
最后,所有这些能力应该放在最小的飞行器中,因为重量和体积直接关系到机器人的续航能力和对狭窄空间的穿越能力。
然而,这四个方面的要求却是相互矛盾的,想要同时实现需要精确的权衡。例如,更高的轨迹最优性要求复杂的建模和求解空间中的更多迭代求解次数,这会极大的增加计算时间和计算成本。更高的可扩展性要求以更一般化的形式定义问题和任务,但要牺牲潜在的对特定任务的优化。
“对于空中机器人集群来说,满足安全性、动力学可行性、最小化时间以及最大化轨迹平滑度已经是一项巨大的挑战,同时在微型平台上实现更是难上加难。这就是为什么以前的研究无法从结构化的、人为的环境走向不确定性的野外环境。”论文中说。
在现实世界中,Intel、High Great和CollMot已经展示了令人印象深刻的空中机器人编队表演。然而,在大规模和成功的商业用途背后,使用全球导航卫星系统定位的空中机器人编队仅仅遵循预先设定的轨迹,无法在有障碍的野外地点操作。
为了解决这一问题,机器人研究者们试图从大自然中找到灵感,即观察大自然如何应对这种导航挑战。在自然界,昆虫执行短期反应,而鸟类喜欢相对长期的平稳动作。这是因为鸟类比昆虫有着更敏锐的视觉和运动感觉、自由度更高的运动系统、以及更大的大脑容量。
昆虫与鸟类这两大飞行物种也启发了两种主流空中机器人导航方法:基于昆虫反应的和基于鸟类轨迹的规划方法。在这两种方法中,前一种在计算和内存方面包含了极其轻量级和高效的解决方案,允许更轻量化的空中机器人集群;而后者显示了更高的优化性和灵活性。为了提高任务效率和可扩展性,高飞的团队选择了后者。
在研究各种空中机器人集群应用后,团队发现解决“TEEM”难题的关键是机器人轨迹时空规划,即不仅仅是能够改变轨迹形状,还需要调整时间分布,以最大限度地利用空间。如果仅进行空间变形,空中机器人在通过狭窄通道时,往往会绕行等待其它机器人,这将阻碍后续空中机器人的飞行,导致飞行轨迹较差甚至不安全。因此,同时规划飞行轨迹的形状和时间,也称为时空轨迹规划,是空中机器人安全高效飞行的关键。尽管如此,这种联合优化对于多旋翼飞行器来说是一个巨大挑战,因为共同确定轨迹的空间和时间参数是高度耦合的。
“实现联合时空轨迹规划,保证机器人集群中每一个机器人都能实现轨迹的时空最优。这无疑是研究中最为困难的。”高飞说。
团队在其提出的方法中,通过解耦目标函数计算中的时空参数,实现了优化变量与表示轨迹的中间变量之间的线性复杂度映射,从而实现了时空优化。因此,即使在最受限的环境中,空中机器人也可以在短短几毫秒内获得高质量的轨迹。
特别地,在团队的空中机器人集群中,每架空中机器人都具有完整的感知、定位、规划和控制功能,并通过广播网络共享轨迹从而实现群体协同。这类似于鸟类能够在森林中自由飞行,同时避开障碍物和其他移动的生物。例如,在近程导航中,鸟类主要依靠眼睛和前庭系统,相应地,团队开发了改进的视觉惯性里程计(visual-inertial odometry)。此外,鸟类可以同时调整路径和速度以避免碰撞,同时考虑飞行时间和平滑度以节省能量,因此团队提出了多目标时空轨迹联合优化方法。除了具备小型鸟类的能力,团队还进一步利用了机器人这一人工电子系统的优势,将高保真无线通信用于运动轨迹共享,将高速计算用于快速规划。此外,团队的解决方案满足了个体智能和群体智能的分布式协调,提高了系统的鲁棒性。
目前,团队在论文中已经发布了空中机器人集群研究的前沿算法软件,“开发人员可以部署和使用这些软件,从仿真环境中验证他们的算法,在未来,这些算法能够应用在物流小车、机器人配送、野外搜救等领域和环境。”高飞说。
值得一提的是,在论文中,团队通过在真实世界的实验,重点展示了四个具有挑战性的应用。而就在论文发表的当天,高飞团队在国内知名视频网站哔哩哔哩上发布了这四个实验场景的视频,截止本文撰写时,已获得5.6万的播放量。
飞越茂密的森林
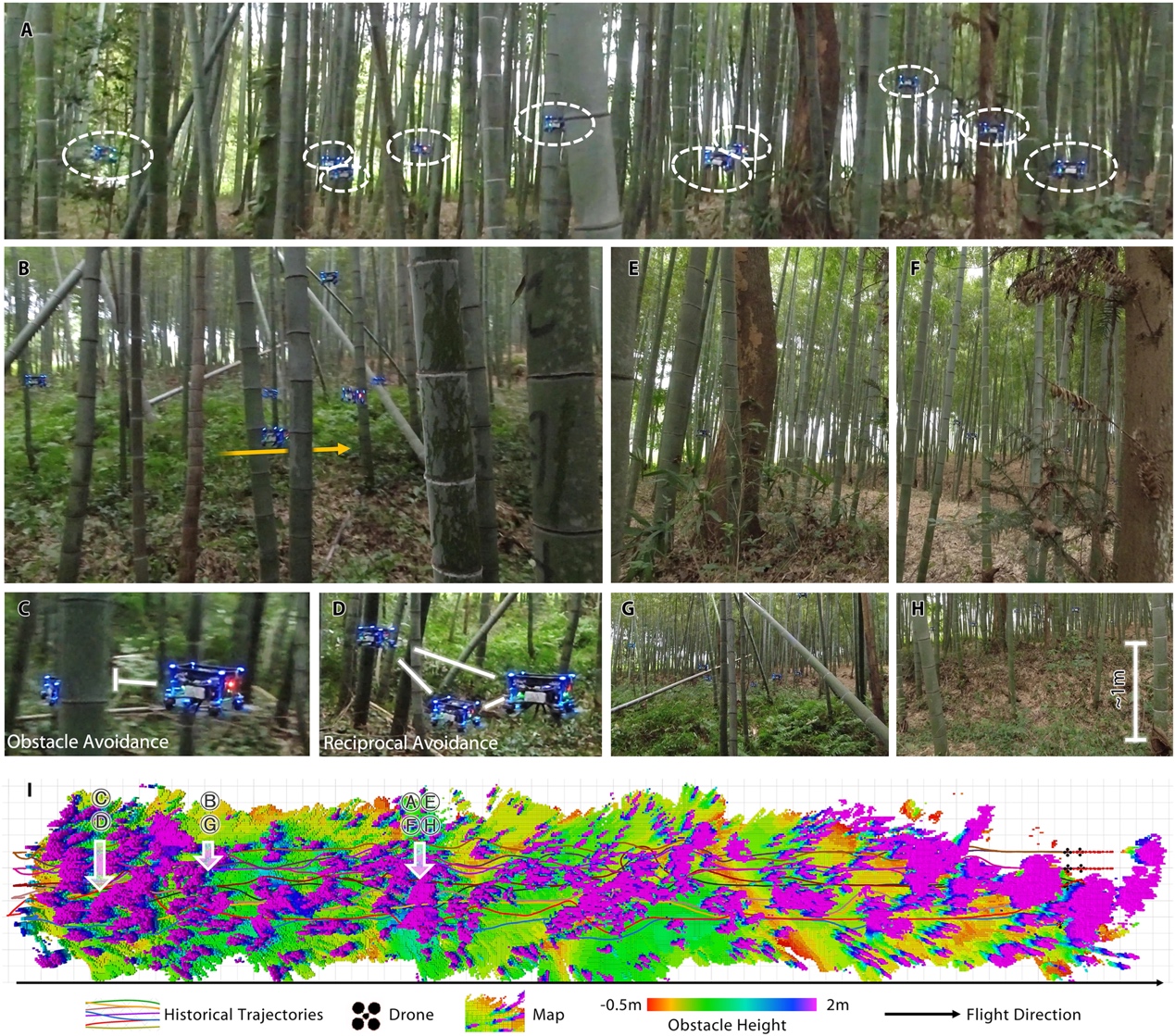

Challenging wild navigation with bamboos and various other obstacles.本实验旨在展示在高度密集的野生环境,即竹林中,空中机器人集群实现完全自主的群体导航,而不会伤害到机器人本体或植物。图像中呈现的轨迹显示了轨迹规划的显著优势:所规划的轨迹总是直接而平稳地连接一个一个间隙。
在这些环境中,除了垂直生长的竹子外,还有倾斜的竹子、树干、低矮的灌木丛、杂草丛生的沟渠、不平的地面、被风吹起的树叶等障碍物,需要系统对轨迹进行三维规划。这种由形状不规则、分布密集的障碍物组成的非结构化环境,验证了空中机器人集群在大多数混乱的地方(比如灾难场景)导航的能力。
野外的编队导航
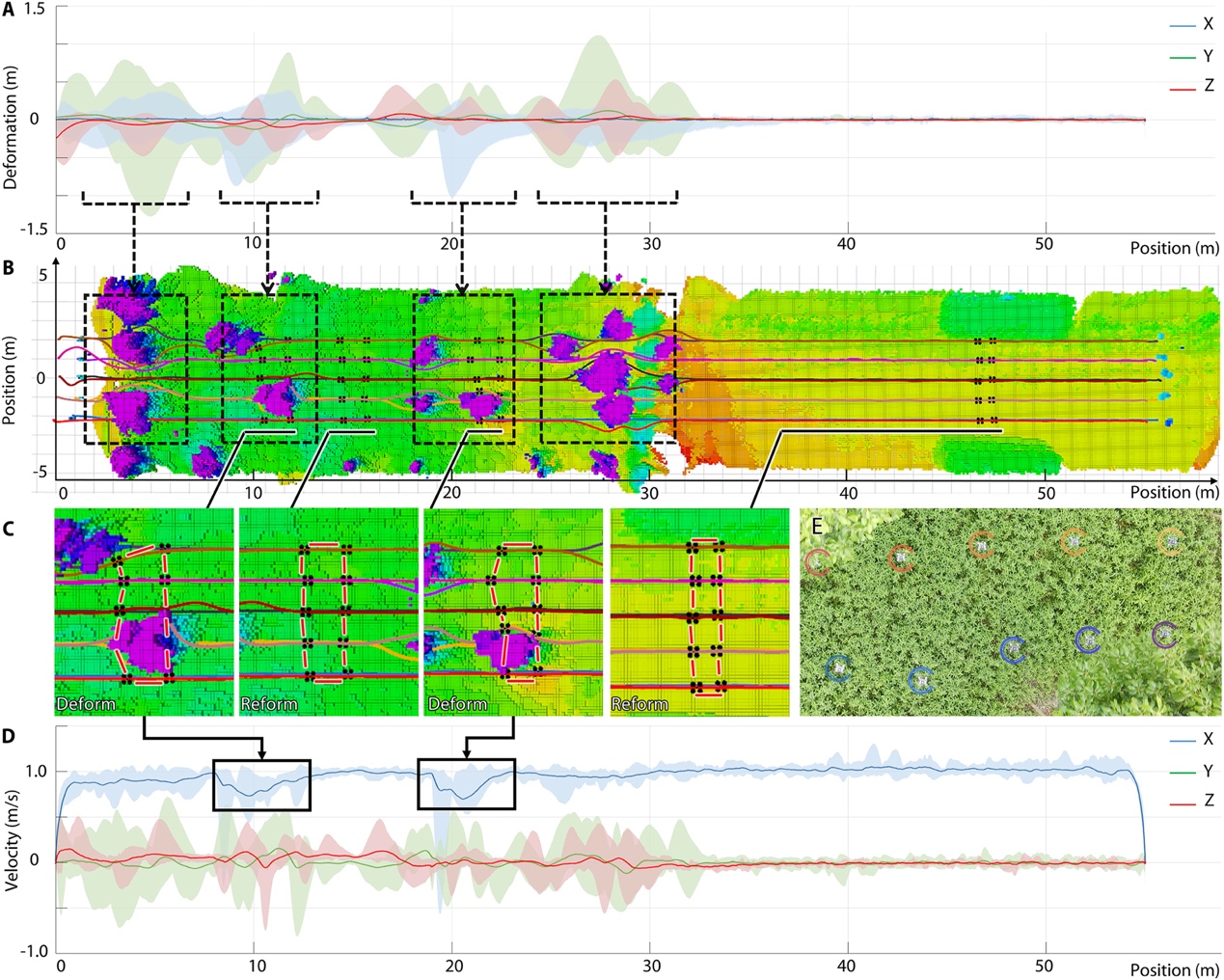
Swarm navigation in formation with prior-unknown obstacles.该实验证明了所提出的统一轨迹规划的可扩展性。在这里,编队被定义为保持一个期望的移动形状,这意味着空中机器人以固定的相对位置移动。与此同时,每架空中机器人还能独立导航,避开障碍物。本实验相对于“竹林穿梭”实验,障碍物密度有所降低,以使编队清晰可辨,但仍有灌木丛、高低错落的树木和两根人造铁柱。
按照规划的轨迹,空中机器人集群以固定队形在树林中飞行。从变形曲线和速度曲线可以看出,尽管空中机器人有时必须偏离路线以避开事先未知的障碍物,但此后会再加快速度以赶上编队,从而群集仍保持编队。当空中机器人避开树木时,平均速度会自动下降,当它们完全回到开放空间时,平均速度会增加。在这种情况下,一些个体的速度变化,在没有显式预编程的情况下也能传播到整个编队。这一结果显示了安全与飞行时间之间的隐性平衡,在障碍物附近减速保留了对潜在碰撞的更多反应时间,而尽可能加速则减少了空旷区域飞行时间。
密集相互避障评估
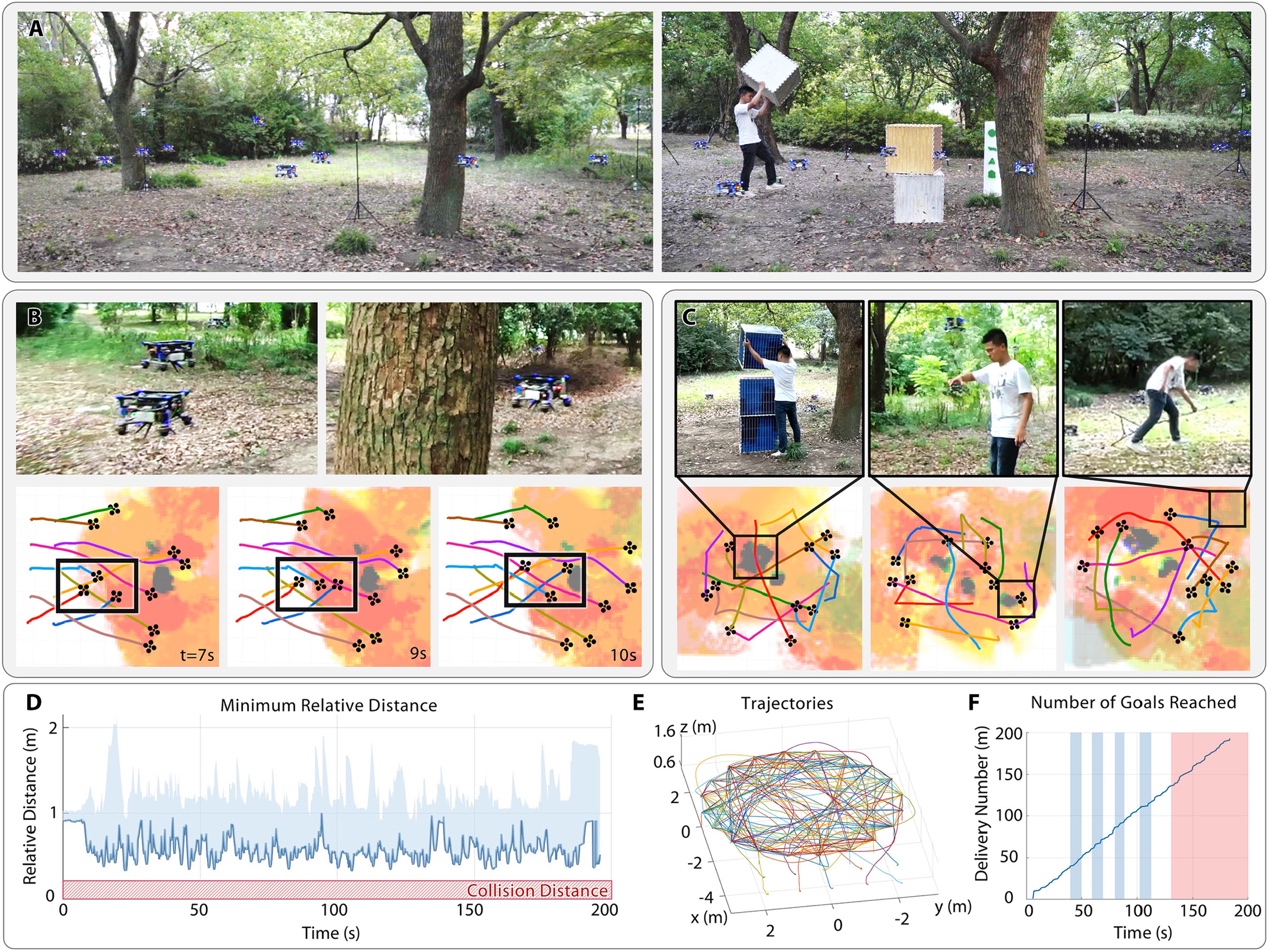
Evaluation of intensive reciprocal collision avoidance with unexpected events这一实验的设置模拟了摩天大楼之间密集空中交通的最基本要求:安全、高效和独立导航。为了验证10架空中机器人的这一能力,试验者在一个半径为3米的圆上,将目标位置随机分配给空中机器人。为了更好地模拟真实的飞行情况, 飞行区域中除了有茂密的树干和摄像机的三脚架,还用长方体和圆柱形障碍物模拟新建建筑,空中机器人集群也需要穿过该地区大型移动障碍物。接下来,实验者关闭所有地面定位标签(仅在本实验中使用),以模拟全球定位的暂时性丢失。
由于安全性和效率是运输系统的两个主要关注点,研究者评估了最小碰撞距离和3分钟飞行中完成交付的总数量(达到目标总数),在整个飞行过程中,研究者将每架空中机器人建模为一个半径为7cm的球体。单架空中机器人设法与障碍物和其他机器人保持安全距离。实验显示,到达目标的数量随时间的增加而线性增加。实验结果表示,在不同障碍物密度下,由于规划的轨迹是局部最优的,因此可以获得接近恒定的增长速率。
目标遮挡情况下的空中机器人集群
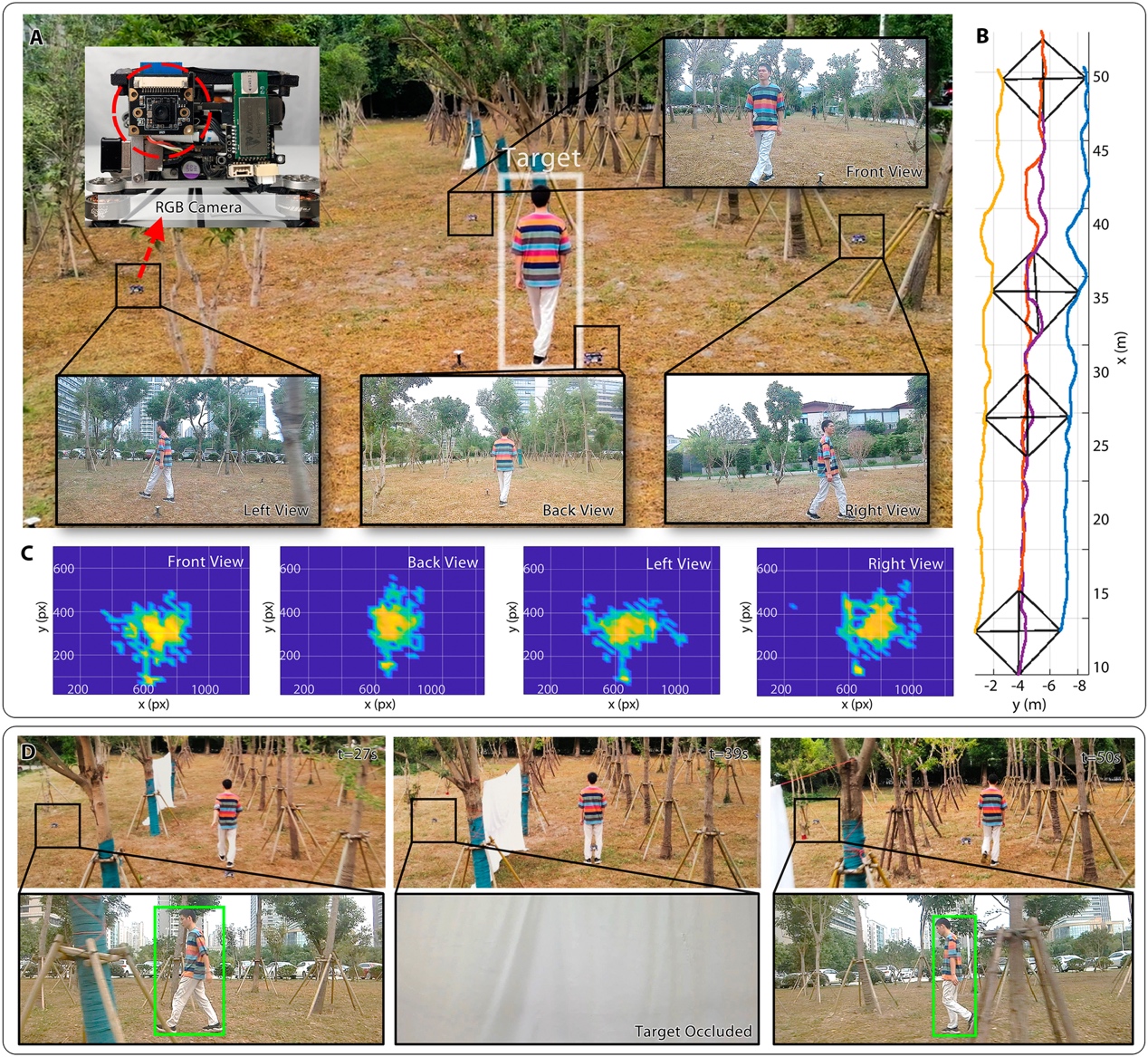
Multidrone tracking with target occlusion.这个实验展示了在微型平台上添加高计算负荷硬件、以及运行额外任务需求的潜力。集群跟踪可以用于多视图航拍和视频,可以对参与者进行全面的记录,为后期编辑提供更多的素材。在实验中,焦点是一个在树林中移动的人类参与者。为了在避开障碍物和其他空中机器人的同时追踪目标,实验设计了跟踪的约束惩罚来规划所需的轨迹。从结果可以看出,被追踪人员可以在不需要担心空中机器人碰撞或跟丢的情况下向前移动。
本文来源于网络,如果侵权立删,操作:浩宇科技,如若转载,请注明本文地址:https://www.86376.net/gedi/765103.html

